Abstract
We address the problem of reactive motion planning for quadrotors operating in unknown environments with dynamic obstacles. Our approach leverages a 4-dimensional spatio-temporal planner, integrated with vision-based Safe Flight Corridor (SFC) generation and trajectory optimization. Unlike prior methods that rely on map fusion, our framework is mapless, enabling collision avoidance directly from perception while reducing computational overhead. Dynamic obstacles are detected and tracked using a vision-based object segmentation and tracking pipeline, allowing robust classification of static versus dynamic elements in the scene. To further enhance robustness, we introduce a backup planning module that reactively avoids dynamic obstacles when no direct path to the goal is available, mitigating the risk of collisions during deadlock situations. We validate our method extensively in both simulation and real-world hardware experiments, and benchmark it against state-of-the- art approaches, showing significant advantages for reactive UAV navigation in dynamic, unknown environments.
Methodology
Spatio-Temporal RRT* (ST-RRT*)
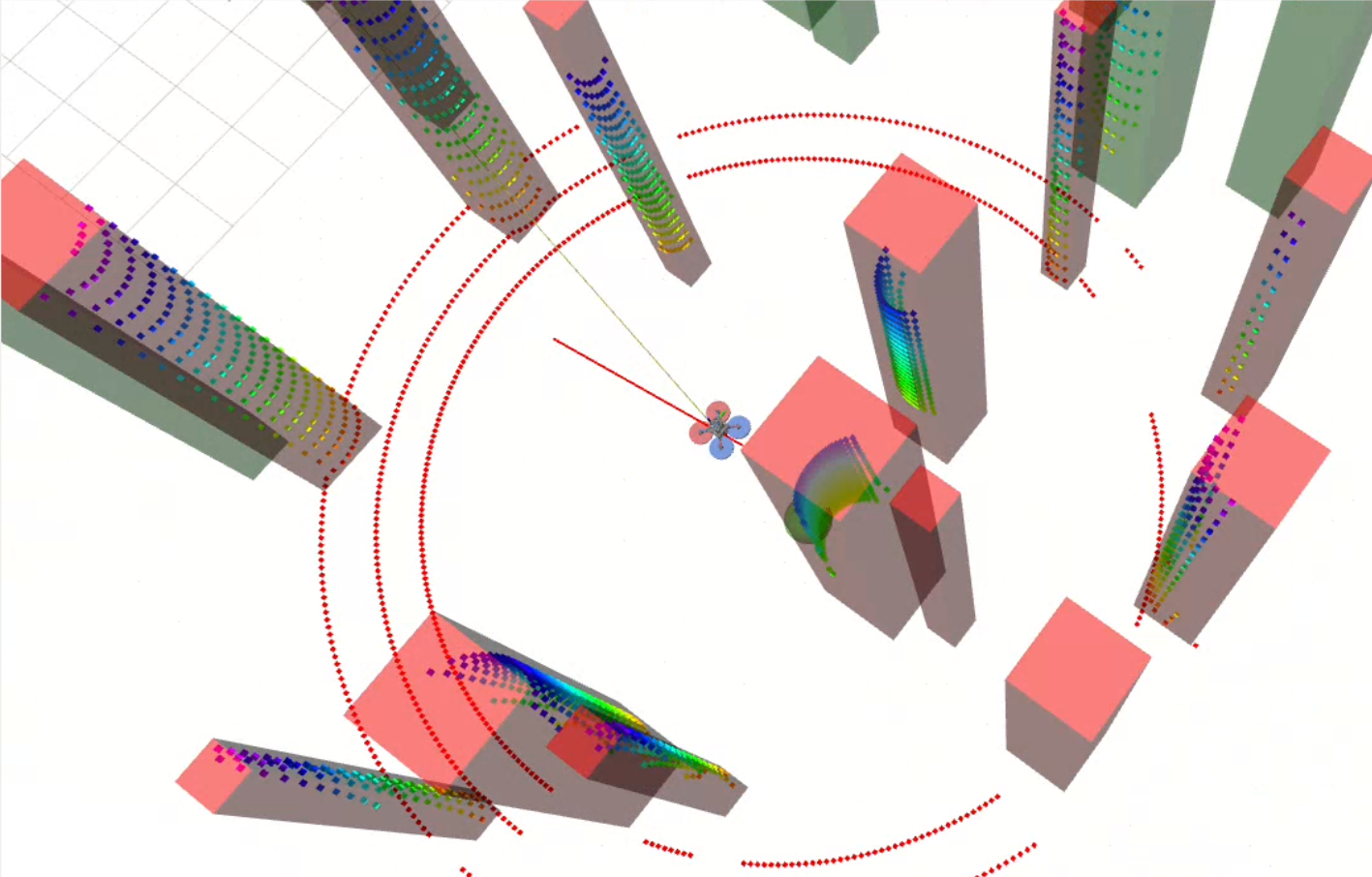
We extend classical RRT* into the spatio-temporal domain by augmenting each node with time (x, y, z, t). This allows the planner to reason about where the UAV will be and when it will be there. Dynamic obstacles are forward-propagated using their estimated velocities, and collision checks are performed at the node’s arrival time. The planner enforces velocity feasibility and causality, ensuring physically realizable motion.
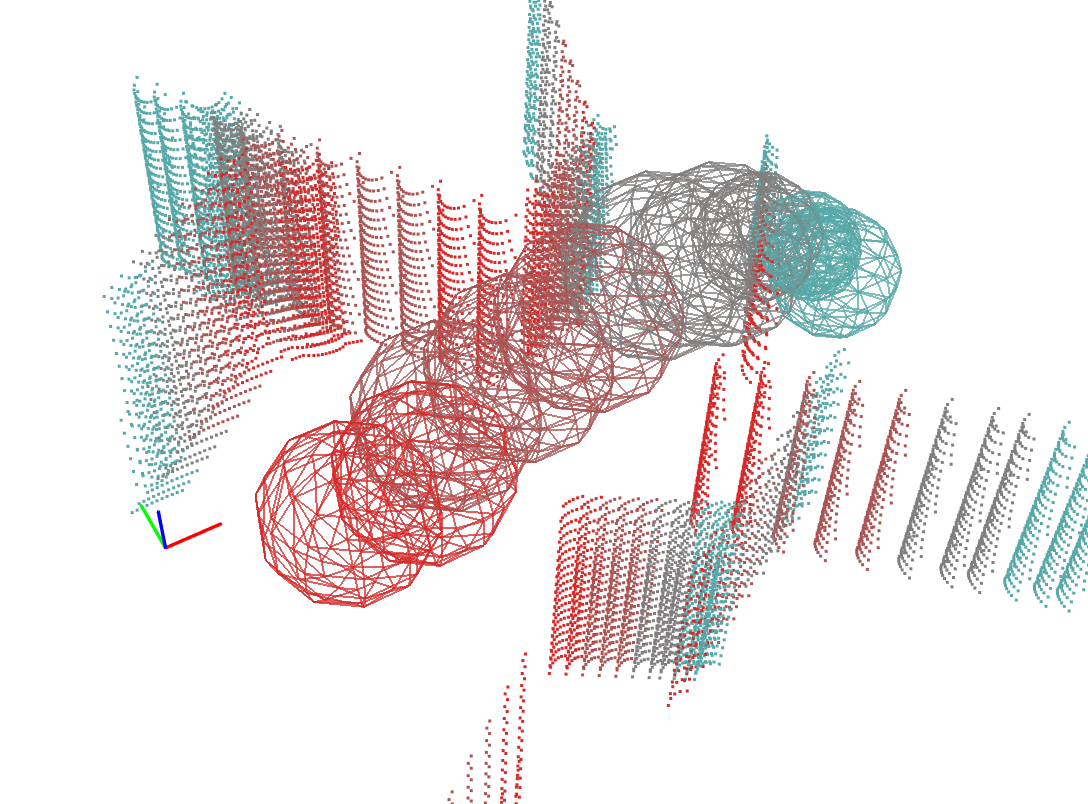
Spatio-temporal RRT planning with time-augmented nodes.
Convex Decomposition & Safe Flight Corridors
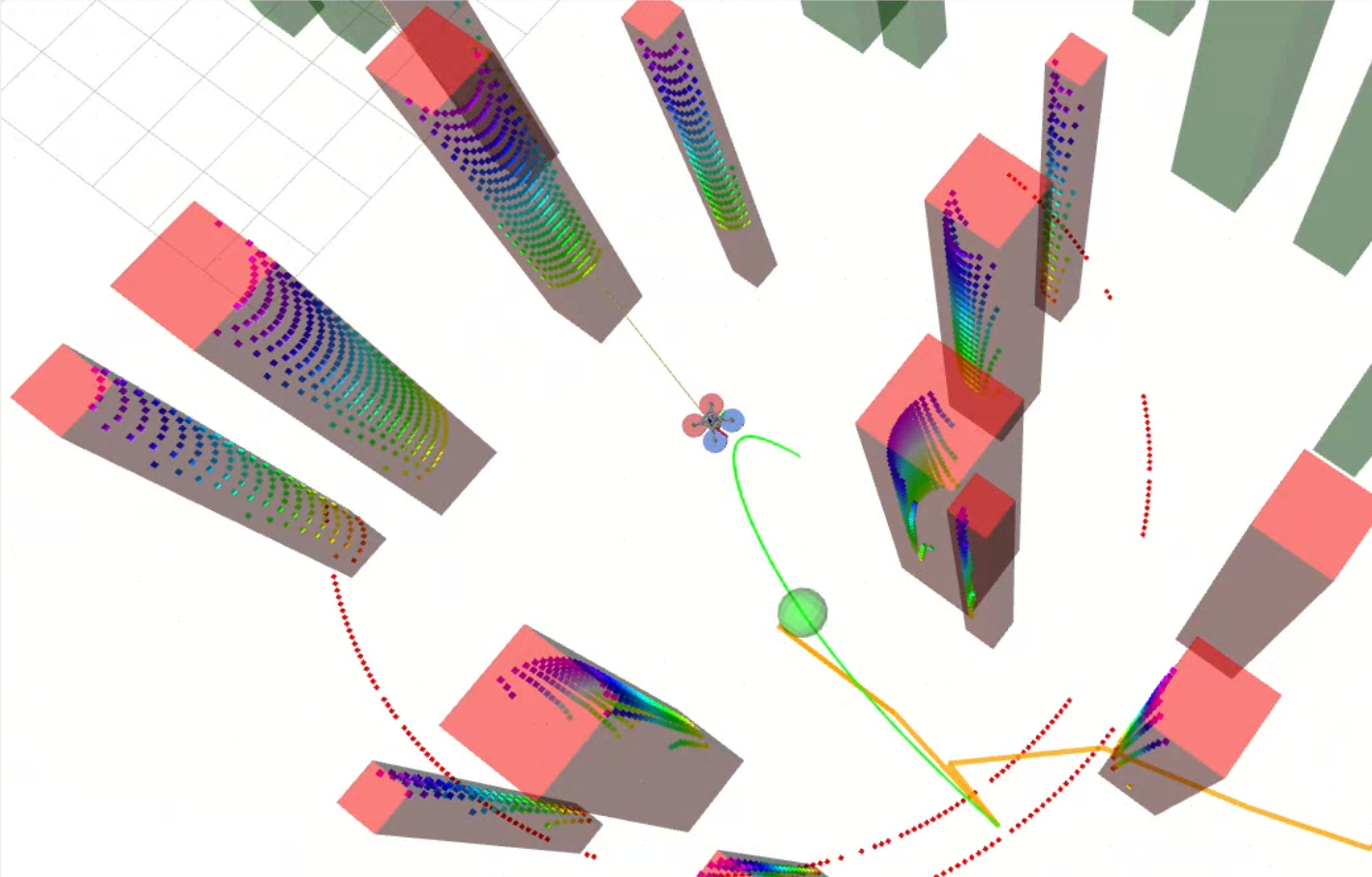
The skeletal path generated by ST-RRT* is inflated into a sequence of overlapping convex polyhedra forming a Safe Flight Corridor (SFC). For dynamic environments, obstacle positions are predicted across short time intervals and aggregated during corridor construction. This produces spatio-temporally safe corridors that account for both static and moving obstacles. A minimum-jerk trajectory is then optimized inside these corridors using the MINCO framework.
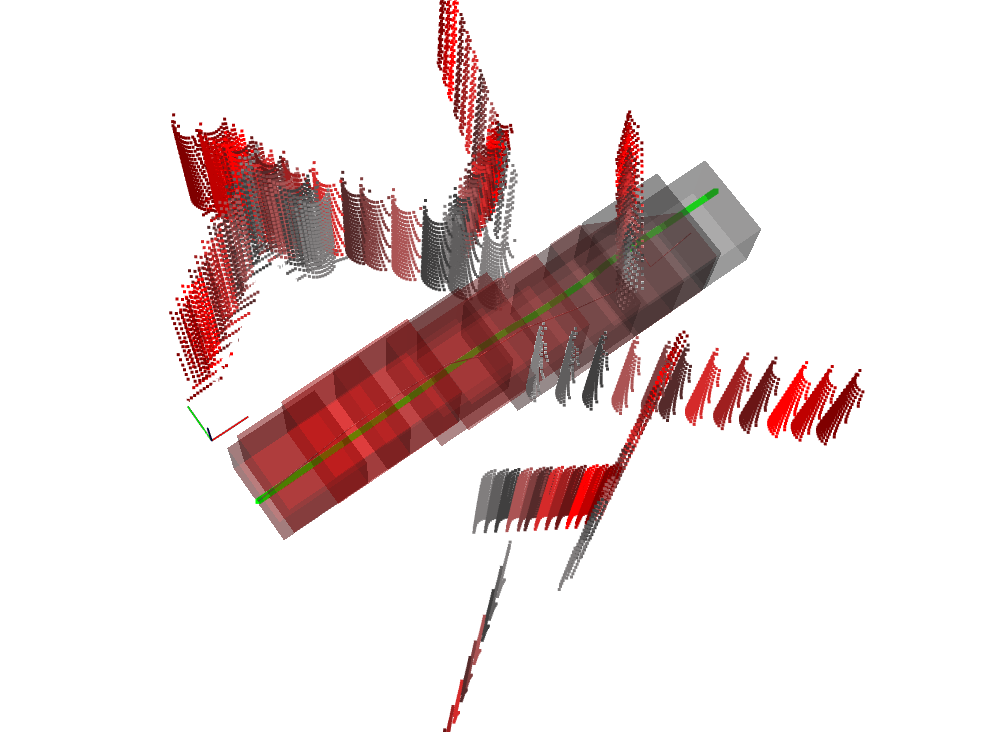
Spatio-temporal Corridors.
Backup Planner for Deadlock Handling
When no feasible goal-directed path exists, the system activates a reactive backup planner. A local convex region is built around the UAV using only static obstacles, and a repulsive artificial potential field determines a safe escape direction. The UAV moves toward this intermediate goal until normal planning becomes feasible again. This mechanism significantly reduces deadlock-induced collisions in cluttered dynamic scenes.
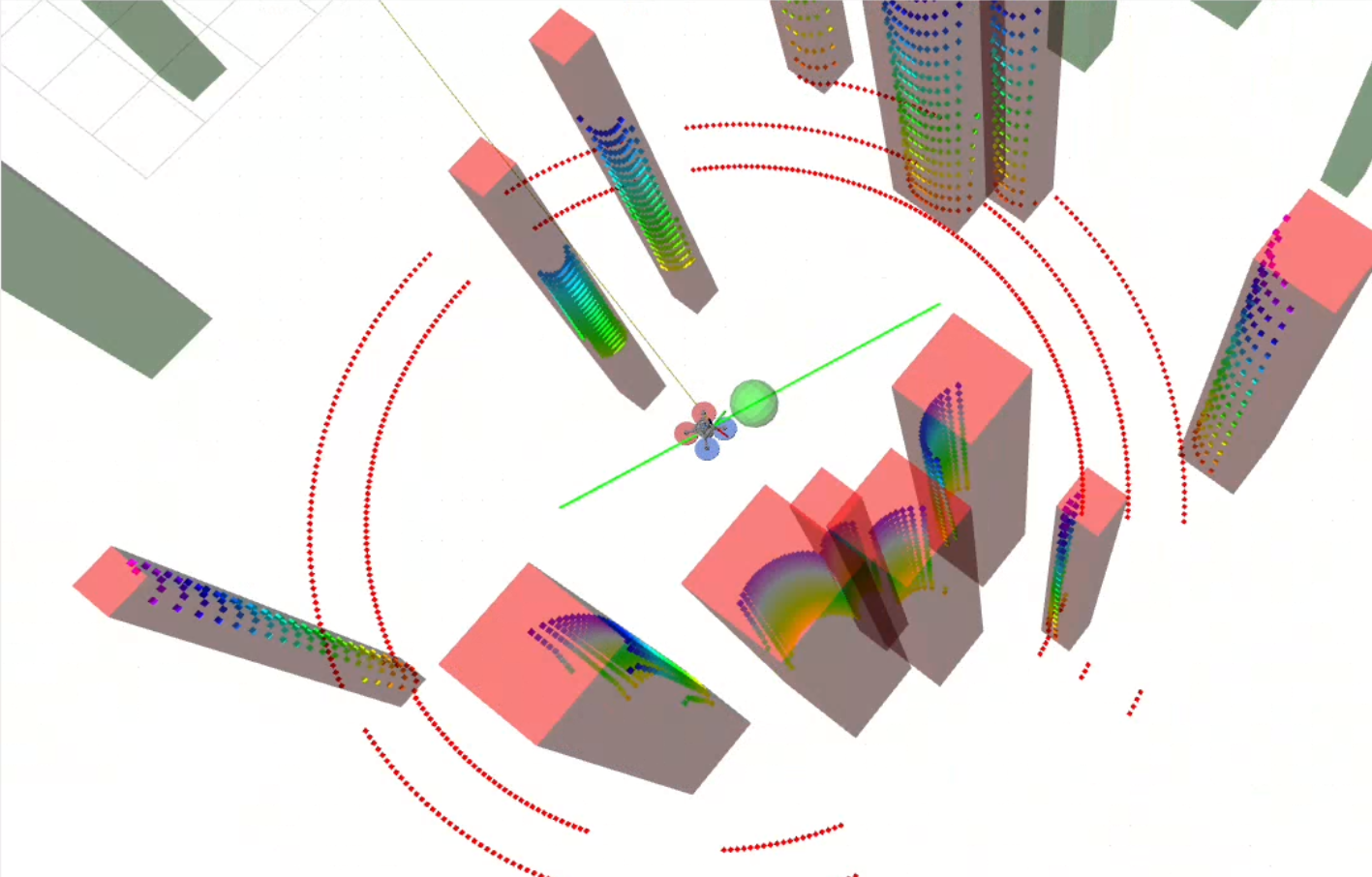
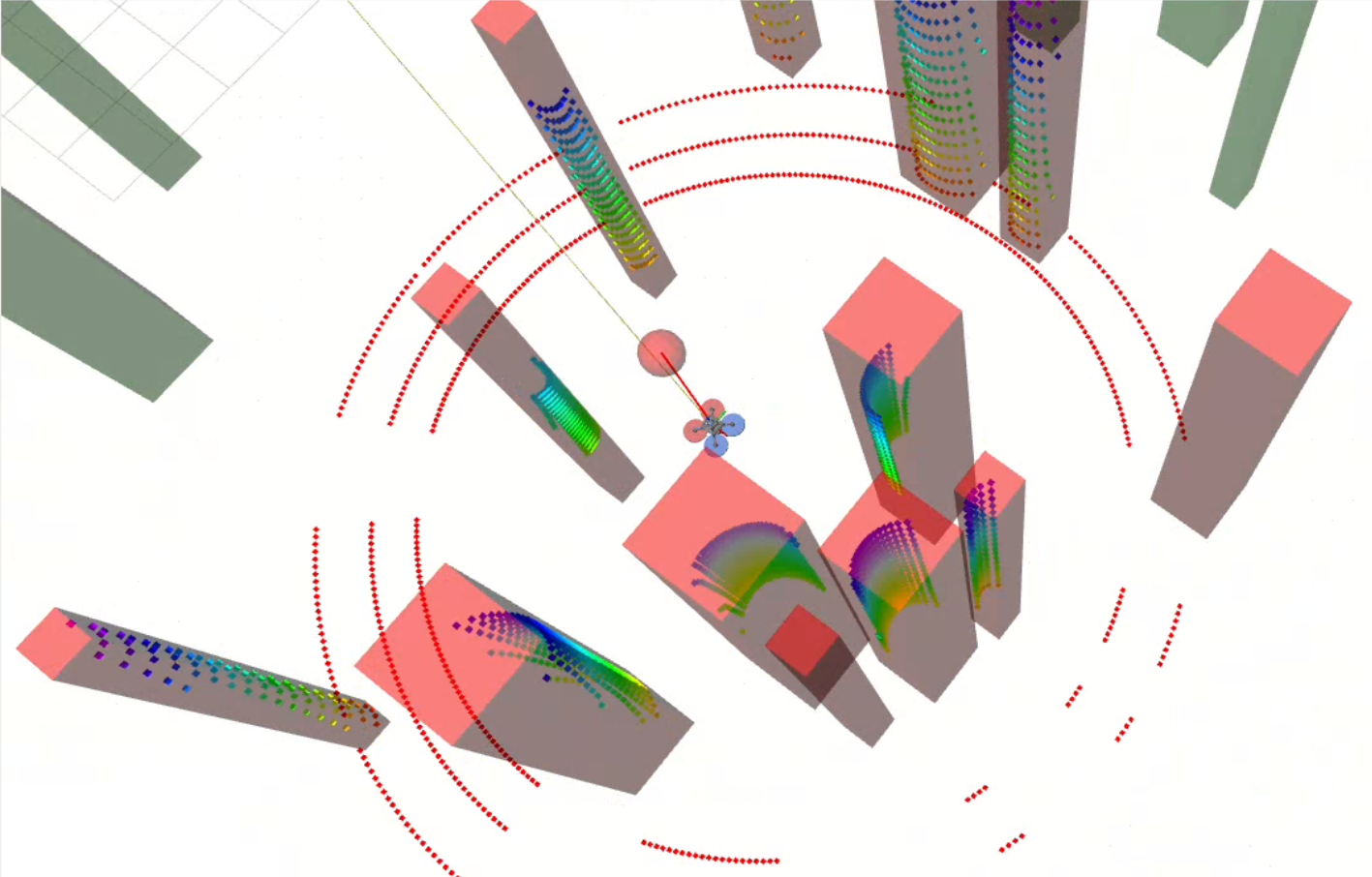
Backup planner handling deadlock situations: (a) Deadlock encounter, (b) Backup generation, (c) Backup tracking, (d) Replanning.
Planning Pipeline
The entire system is governed by a finite-state machine with three modes: Initial, Incremental, and Backup. The planner continuously refines trajectories within the sensing horizon while monitoring safety. This mapless pipeline operates directly on onboard perception, enabling real-time reactive navigation in unknown environments.
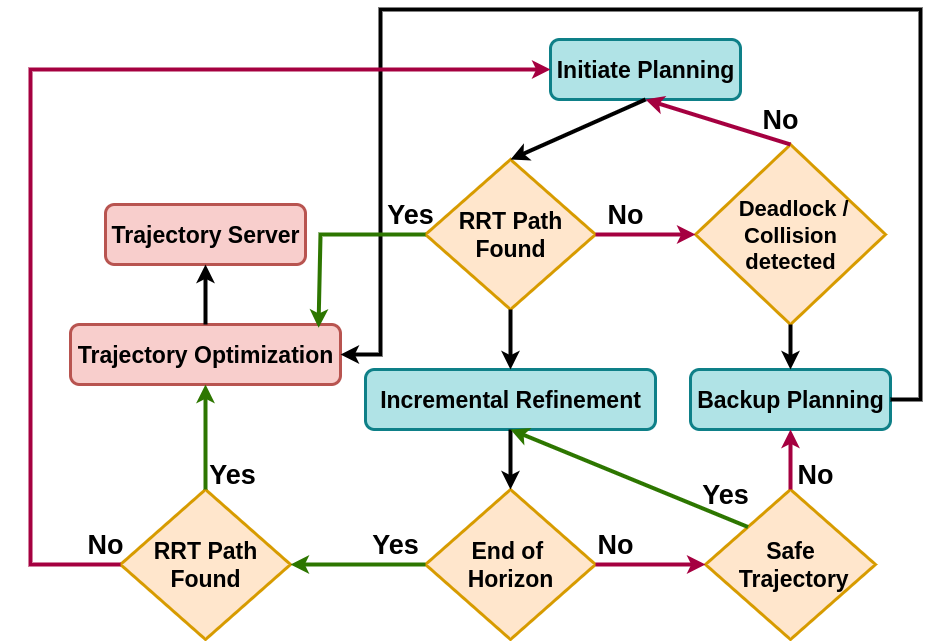
Planning Finite State Machine.